Welcome to the Institute of Robotics and Intelligent Systems
The Institute of Robotics and Intelligent Systems (IRIS) is part of ETH Zurich, Switzerland. It currently consists of ten independent laboratories that conduct research in areas ranging from nanodevices for biomedicine, to systems for rehabilitation and autonomous aerial vehicles.
Department of Mechanical & Process Engineering (D-MAVT)
Multi-Scale Robotics Lab
Multi-Scale Robotics Lab
The Multi-Scale Robotics Lab (MSRL), led by Prof. Brad Nelson, pursues a dynamic research program that maintains a strong robotics research focus on several emerging areas of science and technology.
Our team's mission, led by Prof. Roland Siegwart, is to create intelligent robots and systems that are able of operating autonomously in complex and diverse environments.
At the Vision for Robotics lab (V4RL), led by Prof. Margarita Chli, we research and develop vision-based perception capabilities for robots drawing inspiration from disciplines such Computer Vision, Machine Learning and Neuroscience.
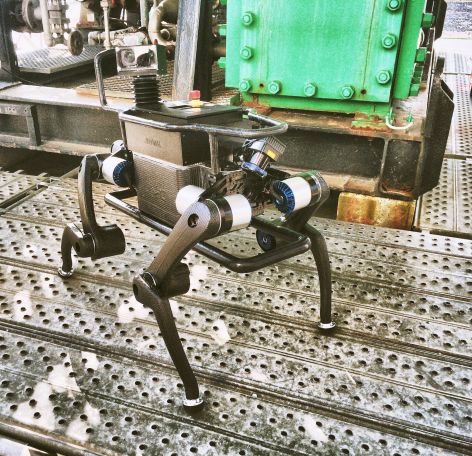
The Robotic Systems Lab, led by Prof. Dr. Marco Hutter, designs machines, creates actuation principles, and builds up control technologies
for autonomous operation in challenging environments.
Acoustic Robotics for Life Sciences and Healthcare
Acoustic Robotics for Life Sciences and Healthcare
Our goal is to pursue interdisciplinary, cutting-edge research in micro/nanorobotics and micro/nanosystems for applications in biomedical engineering, diagnostics, and medicine using ultrasound.
Within the Soft Robotics Laboratory we address the fundamental academic and technical challenges in the creation, modeling, control, and learning techniques of soft robots.
Department of Health Sciences &Technology (D-HEST)
Sensory-Motor Systems Lab
Sensory-Motor Systems Lab
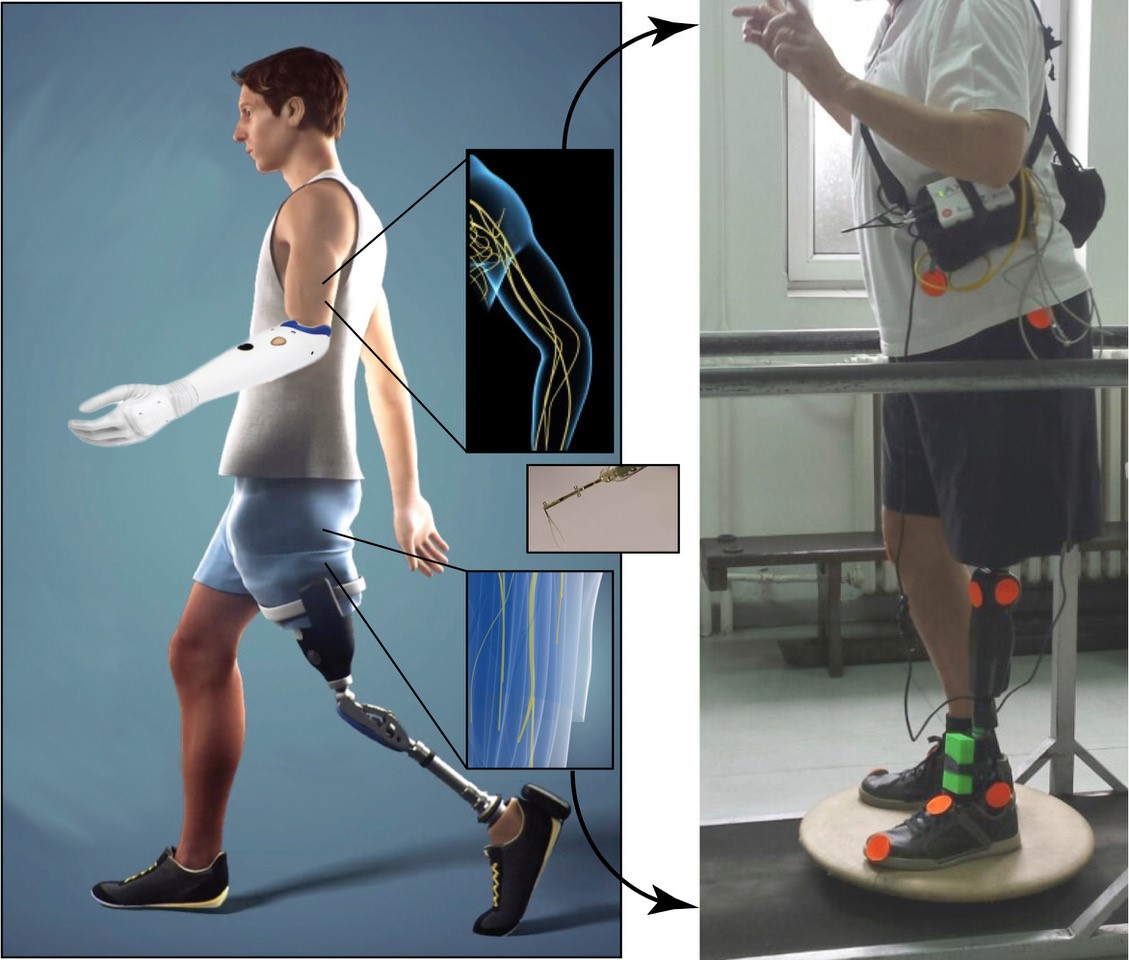
The Sensory-Motor Systems Lab, led by Professor Robert Riener, focuses on the study of human sensory-motor control, design of novel mechatronic machines, and investigation and optimisation of human-machine interaction.
The Rehabilitation Engineering Laboratory at ETH Zurich applies robotics, wearable sensor technologies and neuroimaging to assess, explore and restore human sensorimotor function.
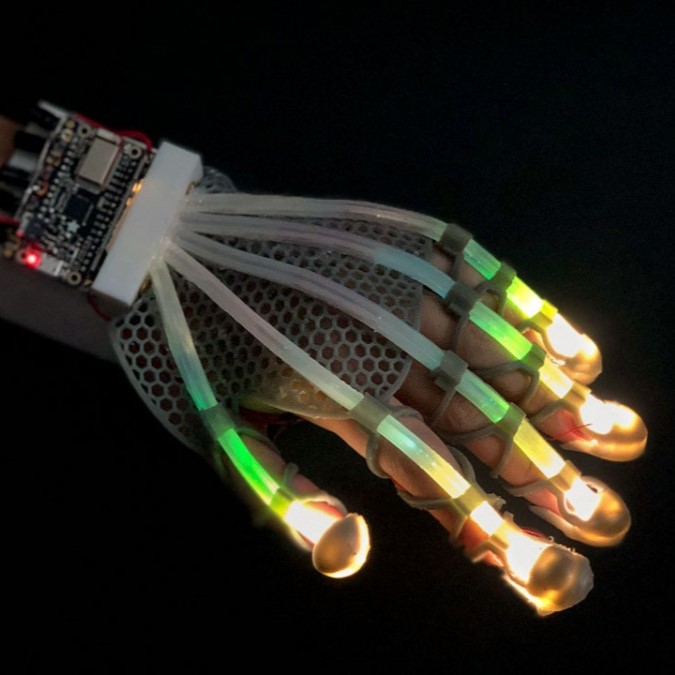
Our research on AI and advanced materials lets us develop transformative technology to interface society and the digital world; we currently focus on unobtrusive wearables.
We develop soft materials and mechanisms that would enable unusual form and unconventional functions of soft devices and robots. Our interests range from soft optics, sustainable robotics, to soft robotic bioelectronics.
The Institute of Robotics and Intelligent Systems aims to maintain cooperations with associated institutes to build a strong network of experts from various fields of robotics and intelligent systems.
University of Zurich
Robotics and Perception Group
Robotics and Perception Group
The Robotics and Perception Group led by Prof. Davide Scaramuzza researches robust deep learning, perception, and control methods to enable autonomous navigation of agile robots, such as drones, in challenging real world environments using only onboard perception and computation.
The Responsive Biomedical Systems Lab develops diagnostic and therapeutic systems at the nano-and microscale with the aim to tackle a range of challenging problems in health care.