Master
Master Theses at IRIS
Deep Learning of Residual Physics For Soft Robot Simulation

Incorporating state-of-the-art deep learning approaches to augment conventional soft robotic simulations for a fast, accurate and useful simulation for real soft robots.
Keywords
Soft Robotics, Machine Learning, Physical Modeling, Simulation
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-08 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Michelis Mike , Katzschmann Robert, Prof. Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
Self-Supervised Event-Driven World Models for High-Speed Scene Forecasting

Predicting how a dynamic scene will evolve is a cornerstone of safe, agile robotic navigation. While conventional self-supervised world models rely on frame-based video prediction, they fail during rapid motions due to motion blur and low sampling rates. Event cameras circumvent these limitations by tracking continuous brightness changes with microsecond latency. This project focuses on developing a Self-Supervised Event-Driven World Model (S-EWM) that learns to forecast future environmental states directly from raw, asynchronous event streams. By predicting future event distributions or synthesized frames without human labels, the model will capture the underlying physics of highly dynamic environments, serving as a powerful representation for downstream robotic perception.
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-08 , Earliest start: 2026-07-27 , Latest end: 2027-07-30
Organization Robotics and Perception
Hosts Pellerito Roberto
Topics Engineering and Technology
Intelligent Tool Retrieval Via Bluetooth Localization

This project aims to build an LLM-powered pipeline that interprets a user's task request, localizes the required tools on a Bluetooth beacon-based map, and computes the shortest path to retrieve them. Developed in collaboration with HILTI.
Keywords
Robotics, Mapping, Large Language Models (LLMs), Object-Goal Navigation
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-08 , Earliest start: 2026-09-01 , Latest end: 2027-05-31
Organization Robotic Systems Lab
Hosts Scheidemann Carmen
Topics Information, Computing and Communication Sciences , Engineering and Technology
HapticCoach - System Development for Remote Vibrotactile Movement Guidance

A remote instructor can see a learner's movement but cannot physically guide it, making verbal feedback alone often imprecise. This project will build upon collabjam (an existing research system) to let one person communicate movement instructions remotely to another person through live vibrotactile cues.
Keywords
Telehaptics, Remote Guidance, Development, Vibrotactile Feedback, Design
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-08 , Earliest start: 2026-08-03 , Latest end: 2027-03-05
Organization Sensory-Motor Systems Lab
Hosts Sabnis Nihar
Topics Engineering and Technology
Development of a Flexible Robotic Device for Navigation in the Cingulate Gyrus

We are looking for motivated Master students to design a novel type of deep brain stimulation (DBS) robotic electrode carrier using variable stiffness mechanisms and shape sensing technologies to conform the specific anatomy of stimulation target areas in the brain.
Keywords
Master-thesis; Deep Brain Stimulation; Medical Robotics; Instrument Design
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-08 , Earliest start: 2026-09-27
Organization Medical Robotics Lab
Hosts Bertrand Thibaud , Boehler Quentin
Topics Engineering and Technology
Robotic Platform for Optoacoustic Data Acquisition During Sequential Focused Ultrasound Ablation

This project is co-hosted with the group of Functional and Molecular Imaging, ETH Zurich which will act as the main host for the student. Please refer to the original project advertisment for more details and for application: https://sirop.org/app/90e2db70-5162-4e51-b3cf-d5d933c0f240
Keywords
medical robotics, robotic positioning, focused ultrasound therapy, ultrasound imaging, optoacoustic imaging
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-08 , Earliest start: 2026-09-01 , Latest end: 2027-06-30
Applications limited to ETH Zurich
Organization Medical Robotics Lab
Hosts Boehler Quentin , Esteban Isaac
Topics Medical and Health Sciences , Engineering and Technology
Reach-Avoid Motion Planning for Surgical Robotic Procedures in Deformable Anatomies

Surgical procedures involve navigating through deformable anatomical structures to progress towards the surgical objectives while avoiding unsafe actions. A relevant use-case for this challenge is avoiding penetration of eloquent brain areas during steerable needle biopsy. In this case, the needle's motion must be planned such that it reaches a goal while being invariant to a safe set. A key difficulty in cranial neurosurgery is that the safe set may be displaced relative to preoperative images, e.g., due to brain shift, soft-tissue deformation from surgical manipulation, or simply periodic respiratory motion or cardiac pulsation. This makes pre- and intra-operational motion planning challenging. Although new machine learning pipelines enable topology predictions of deformable materials, obtaining guarantees for these predictions in safety-critical procedures is still an open problem.
Keywords
medical robotics, uncertainty quantification, machine learning, motion planning
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-08
Organization Medical Robotics Lab
Hosts Kehler Leon , Boehler Quentin
Topics Engineering and Technology
Development of a Force-Sensing Robotic Needle for Tissue Identification and Characterization

We are looking for motivated Master students to build a platform for characterizing and identifying soft tissue based on the insertion force of a biopsy needle. This will advance the state of the art of minimally invasive surgery by giving surgeons additional tools to accurately reach critical areas in various anatomies.
Keywords
Master Thesis; Medical Robotics
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-08 , Earliest start: 2026-09-27
Organization Medical Robotics Lab
Hosts Bertrand Thibaud , Boehler Quentin
Topics Engineering and Technology
Design Optimization of Robotic Magnetic Navigation Platforms Under Uncertainties

Robotic magnetic navigation enables novel procedures in minimally invasive procedures, including targeted drug delivery using untethered capsules, and robotic catheters and guidewires for endovascular interventions. However, characterizing how design choices and uncertainties in subsystems propagate to system-level guarantees remains underexplored. Such robotic platforms typically comprise a magnetic actuation subsystem, a localization subsystem (e.g., a fluoroscope), and a magnetized in-body agent (e.g., a capsule or guidewire). In this project, we aim to formulate the system design problem as a multi-objective optimization problem and use tools from compositional design theory (co-design) --- a framework that decomposes a system into subsystems whose individual design constraints can be optimized jointly --- to solve it tractably.
Keywords
medical robotics, multi-objective optimization, uncertainty quantification, simulation
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-08
Organization Medical Robotics Lab
Hosts Boehler Quentin , Kehler Leon
Topics Engineering and Technology
Guiding blind alpine skier by an appropriate auditory system

This work continues the prototype development that has already begun, so that testing can then take place on the ski slopes in the autumn.
Keywords
alpine sport, parathletes, auditory cues
Labels
Semester Project , Master Thesis
Project Background
Your Task
Your Benefits
Your Profile
Contact Details
More information
Published since: 2026-07-07 , Earliest start: 2026-06-27 , Latest end: 2027-03-31
Applications limited to Department of Information Technology and Electrical Engineering , Department of Health Sciences and Technology , Department of Mechanical and Process Engineering
Organization Sensory-Motor Systems Lab
Hosts Wolf Peter
Topics Medical and Health Sciences , Engineering and Technology
Vision Language Action models for Drones

This project explores generative modeling of drone flight paths conditioned on natural language commands and spatial constraints, aiming to produce plausible 3D trajectories for training reinforcement learning policies. We investigate model architectures, data sources, and trajectory extraction methods to ensure generated paths are both physically feasible and stylistically aligned with textual descriptions.
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-07 , Earliest start: 2025-09-05 , Latest end: 2026-12-01
Organization Robotics and Perception
Hosts Pellerito Roberto
Topics Information, Computing and Communication Sciences , Engineering and Technology
Student Intern — Marketing Content & Visual Communication for Medical Device Startup
Support the marketing team at Skaaltec in building a content pipeline for SmartVNS, a Class IIa wearable medical device for stroke rehabilitation. You will create visual assets, short videos, illustrations, and supporting marketing material for digital channels, pitch decks, and clinical communications, while helping track the effectiveness of our marketing activities.
Keywords
Student internship; Praktikum; Marketing; Content creation; Visual communication; Graphic design; Video editing; Social media support; Marketing KPIs; Analytics; Medical device; MedTech; Healthtech; Class IIa; Stroke rehabilitation; Wearable; Branding; Illustration; Canva; Figma; Adobe; Investor materials; Startup; ETH Zurich; SmartVNS
Labels
Semester Project , Internship , Master Thesis
Description
Goal
Tasks
Your Profile
Contact Details
More information
Published since: 2026-07-07 , Earliest start: 2026-08-01
Organization Rehabilitation Engineering Lab
Hosts Fornera Reda
Topics Journalism, Librarianship and Curatorial Studies , Commerce, Management, Tourism and Services
Learning-based Control for Magnetic Levitation

This project aims to push the boundaries of remote magnetic levitation by targeting the simultaneous levitation of three distinct objects within the same workspace. Due to the highly non-linear nature of magnetic interactions, we will explore control techniques such as Model Predictive Control and learning-based methods. The project can be tailored to the student’s interests and background.
Keywords
magnetic levitation, learning-based control, machine learning, reinforcement learning
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Contact Details
More information
Published since: 2026-07-07 , Earliest start: 2026-09-01 , Latest end: 2027-04-30
Organization Multiscale Robotics Lab
Hosts Zughaibi Jasan
Topics Engineering and Technology
3D Bioprinting of Neurotized and Disease-Model Skeletal Muscle Tissues: Focus on Duchenne Muscular Dystrophy

This project aims to develop advanced 3D bioprinted skeletal muscle models with functional innervation, including neurotized healthy muscle tissues and in vitro models of Duchenne muscular dystrophy (DMD). Using state-of-the-art biofabrication strategies, the project will generate physiologically relevant muscle constructs suitable for functional characterization and pharmacological testing. These platforms are intended to support both fundamental research on neuromuscular interactions and translational studies for drug evaluation.
Keywords
3D bioprinting, skeletal muscle tissue, innervation, neuromuscular junctions, Duchenne muscular dystrophy, disease modeling, pharmacological testing, biofabrication, biomaterials, tissue engineering.
Labels
Semester Project , Master Thesis , Other specific labels , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-06 , Earliest start: 2026-07-01 , Latest end: 2027-02-28
Organization Soft Robotics Lab
Hosts Filippi Miriam
Topics Medical and Health Sciences , Engineering and Technology , Biology
Refinement and Optimization of a Wheelchair-Integrated MyoShirt Upper-Limb Exosuit

In the frame of a newly funded project with the Cerebral Stiftung, we are developing a new version of the MyoShirt upper-limb exosuit to assist children and adults with upper-limb weakness in different daily-life activities. The target group is not defined by a specific lesion or disease, but by functional symptoms such as reduced arm strength, limited arm elevation, and difficulty performing activities of daily living. The device is wheelchair-integrated and designed to support shoulder and elbow movements, with future iterations considering distal joint support. Ease of donning and doffing, user acceptance, functional benefit, and reliable assistance during daily-life movements are key design goals. Development and testing of the exosuit will be carried out in close collaboration with our clinical partners at Kinderspital Zürich in Affoltern am Albis. An initial prototype of the new MyoShirt has already been developed as part of ongoing work. The goal of this thesis is to build upon this foundation and work toward a refined second prototype. The student will analyze the current system, define clear technical objectives for improvement, optimize the mechanical design and control performance, and validate the refined system with healthy participants.
Keywords
Myoshirt, Exosuit, Optimization, Control, Design
Labels
Master Thesis
Project Background
Your Task
Your Benefits
Your Profile
Contact Details
More information
Published since: 2026-07-06 , Earliest start: 2026-08-17 , Latest end: 2027-03-31
Organization Sensory-Motor Systems Lab
Hosts KhalilianMotamed Bonab Ali
Topics Medical and Health Sciences , Engineering and Technology
Clinical Protocol Development and User-Centered Evaluation of the MyoShirt Upper-Limb Exosuit

In the frame of a newly funded project with the Cerebral Stiftung, we are developing a new version of the MyoShirt upper-limb exosuit to assist children and adults with upper-limb weakness in different daily-life activities. The target group is not defined by a specific lesion or disease, but by functional symptoms such as reduced arm strength, limited arm elevation, and difficulty performing activities of daily living. The device is wheelchair-integrated and designed to support shoulder and elbow movements, with future iterations considering distal joint support. Ease of donning and doffing, as well as user acceptance and functional benefit, are key design considerations. Development and testing of the exosuit will be carried out in close collaboration with our clinical partners at Kinderspital Zürich in Affoltern am Albis. The goal of this Master thesis is to develop the study protocol for a pilot evaluation of the MyoShirt, prepare and submit the ethics application at ETH Zurich, and, after approval, conduct a pilot study with patients and a focus group with clinicians. The project will help us understand how the device is perceived by clinical experts, how it performs with end users, and how it should be refined in the next development iterations.
Keywords
Soft, Exosuit, Clinical Study, Myoshirt
Labels
Master Thesis
Project Background
Your Task
Your Benefits
Your Profile
Contact Details
More information
Published since: 2026-07-06 , Earliest start: 2026-09-01 , Latest end: 2027-03-31
Organization Sensory-Motor Systems Lab
Hosts KhalilianMotamed Bonab Ali
Topics Medical and Health Sciences , Engineering and Technology
Versatile, Robust and Simulatable Multi-Robot SLAM

Recent work on multi-robot systems with collaborative autonomy has made significant strides towards developing robotic teams capable of performing complex tasks in real, complex settings as shown above. Right at the core of such capabilities is the capability to collaboratively perform SLAM (Simultaneous Localization And Mapping) within such multi-agent systems that can operate efficiently and in challenging real-world environments, which is the main goal of this project.
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-02 , Earliest start: 2026-07-01
Organization Mobile Robotics Lab
Hosts Le Gentil Cédric , Zhang Tianyi
Topics Information, Computing and Communication Sciences , Engineering and Technology
Photorealistic and Semantic 3D Scene Representation for Visual SLAM
Simultaneous Localization and Mapping (SLAM) is the foundation of robotic autonomy, requiring the concurrent estimation of a robot’s pose and the construction of its surrounding environment. While traditional SLAM frameworks focus on geometric primitives, they often lack the “semantic awareness” needed for complex decision-making. Recent advancements in dense 3D reconstruction and deep learning-based segmentation offer a path toward photorealistic maps that are also semantically labeled. However, accurately fusing high-dimensional visual features with spatial geometry remains a significant challenge, especially when aiming for real-time performance and high-fidelity representations.
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-02 , Earliest start: 2026-07-01
Organization Mobile Robotics Lab
Hosts Chen Shi , Zhang Tianyi
Topics Information, Computing and Communication Sciences , Engineering and Technology
LiDAR-Visual-Inertial Odometry with a Unified Representation
LiDAR-Visual-Inertial odometry approaches [1-3] aim to overcome the limitations of the individual sensing modalities by estimating a pose from heterogenous measurements. Lidar-inertial odometry often diverges in environments with degenerate geometric structures and visual-inertial odometry can diverge in environments with uniform texture. Many existing lidar-visual-inertial odometry approaches use independent lidar-inertial and visual-inertial pipelines [2-3] to compute odometry estimates that are combined in a joint optimisation to obtain a single pose estimate. These approaches are able to obtain a robust pose estimate in degenerate environments but often underperform lidar-inertial or visual-inertial methods in non-degenerate scenarios due to the complexity of maintaining and combining odometry estimates from multiple representations.
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-02 , Earliest start: 2026-07-01
Organization Mobile Robotics Lab
Hosts Le Gentil Cédric , Barbas Sebastian
Topics Information, Computing and Communication Sciences , Engineering and Technology
Emergent Acoustic Communication in Robot Groups

Can robots develop their own communication system through sound? We are looking for motivated students to join an interdisciplinary research project at the intersection of robotics, AI, acoustic signaling, and collective behavior.
Keywords
Emergent acoustic communication, Robot Learning, multi-agent communication.
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-01 , Earliest start: 2026-05-15
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts An Tianxu , Wang Shengzhi
Topics Information, Computing and Communication Sciences , Engineering and Technology
Development of Permeable Balloon Catheters for Targeted Drug Delivery

This project focuses on designing and fabricating variably permeable balloon membranes for robotic catheters capable of delivering therapeutics directly to diseased tissue. The work combines materials science, medical device development, and microfabrication to advance minimally invasive cardiovascular therapies.
Keywords
Targeted Drug Delivery, Balloon Catheters, Soft Materials, Medical Devices, Microfabrication, Materials Science
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-26 , Earliest start: 2026-07-19 , Latest end: 2027-05-31
Organization Multiscale Robotics Lab
Hosts Bonomo Tiziano
Topics Engineering and Technology , Chemistry
Manufacturing of advanced neurovascular balloon catheters

This project addresses the challenges of fabricating precision balloon catheters with advanced soft materials through the development of novel manufacturing techniques and experimental validation.
Keywords
Neurovascular Catheters, Targeted Drug Delivery, Advanced Manufacturing, Microfabrication, Medical Devices, Multi-Scale Robotics
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-26 , Earliest start: 2026-07-19 , Latest end: 2027-05-31
Organization Multiscale Robotics Lab
Hosts Bonomo Tiziano
Topics Engineering and Technology
Spectator experience 2.0: Visualisation of the climbers’ remaining energy reserves

To provide spectators at climbing competitions with additional information, this project aims to assess whether oxygen saturation in the forearm muscles can indicate imminent failure.
Keywords
rock climbing, physiology, media
Labels
Internship , Master Thesis
Project Background
Your Task
Your Benefits
Your Profile
Contact Details
More information
Published since: 2026-06-26 , Earliest start: 2026-08-17 , Latest end: 2027-03-15
Applications limited to ETH Zurich
Organization Sensory-Motor Systems Lab
Hosts Wolf Peter
Topics Medical and Health Sciences , Engineering and Technology
Human study to validate wearable technology for scoring of movement analysis tests

We aim to conduct a study with human participants to assess the function of our textile-based wearable technology for movement monitoring in clinical and fitness scenarios.
Keywords
smart clothing, wearable technology, textile sensor, fitness tracking, sports medicine, rehabilitation, human study, motion capture, computer science
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-23 , Earliest start: 2026-07-15 , Latest end: 2026-12-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Medical and Health Sciences , Engineering and Technology
Building AI-assisted algorithms for robust motion monitoring with smart clothing after re-wearing

The aim of this project is to use machine learning methods to improve smart clothing motion tracking when sensors shift between sessions and wears without fully retraining the model.
Keywords
smart clothing, wearable technology, textile sensor, fitness tracking, sports medicine, machine learning, artificial intelligence, domain adaptation, deep learning
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-23 , Earliest start: 2026-02-01 , Latest end: 2027-03-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Information, Computing and Communication Sciences , Engineering and Technology
(Master Thesis / Internship) - Personalized Low Latency Interactive AI

We are seeking one highly motivated student to join our innovative project focused on developing a cutting-edge voice recognition and personalization platform for wheelchair users. This project aims to deliver low-latency, context-aware, and personalized AI interactions in noisy, multi-user environments using edge devices powered by NVIDIA Orin. The system leverages advanced models and distilled LLMs, combined with biosignal tracking, to provide asynchronous interactions that are well-organized and accessible to doctors, while ensuring user privacy.
Keywords
Voice recognition, AI personalization, low latency, SLMs and distilled LLMs, Edge-Computing, audio processing
Labels
Semester Project , Internship , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-22 , Earliest start: 2026-04-01 , Latest end: 2026-12-31
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , CSEM - Centre Suisse d'Electronique et Microtechnique , CERN , Berner Fachhochschule , IBM Research Zurich Lab , Hochschulmedizin Zürich , University of Zurich , Zurich University of Applied Sciences , Lucerne University of Applied Sciences and Arts
Organization Sensory-Motor Systems Lab
Hosts Paez Diego, Dr.
Topics Engineering and Technology
Unified Whole-Body Manipulation Controller

This project aims to develop a unified controller for a quadruped robot equipped with a manipulator arm to command legs and arm simultaneously for mobile manipulation. We aim to enable complex mobile manipulation behaviors on hardware that require coordinated use of both the arm and legs, for example, carrying a large ball using simultaneous arm-foot interaction.
Keywords
reinforcement learning; robotics; robot learning
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-06-22 , Earliest start: 2026-07-01
Organization Robotic Systems Lab
Hosts Elanjimattathil Aravind
Topics Information, Computing and Communication Sciences
Scalable Humanoid Control through Quantized Latent Action Representations

Traditional approaches to humanoid robotics often require training and maintaining N separate policies for N distinct skills (e.g., one policy for walking, one for sitting, one for standing up). This becomes highly unscalable as the robot's repertoire grows. Whole-body motion tracking policies alleviate this problem by training a motion tracking policy on a large repertoire of robot motions. However, simple per-frame tracking policies require a high-level policy which generates reference motions. This project aims to replace isolated skills with a single, unified controller. By learning a Latent Action Model (LAM) that compresses multi-frame human motion into low-dimensional, quantized macro-commands, we can train a single low-level policy on the Unitree G1 to track a wide variety of behaviors dictated entirely by the latent space.
Keywords
Humanoid, Control, Robotics, AI, Reinforcement Learning, Motion Tracking
Labels
Master Thesis , ETH Zurich (ETHZ)
Goal
Contact Details
More information
Published since: 2026-06-21 , Earliest start: 2026-09-06
Organization Mobile Robotics Lab
Hosts Näf Joshua , Hansson Alexander
Topics Information, Computing and Communication Sciences , Engineering and Technology
Connecting AI Agents and Controllers for Instructing Rehabilitation Robots

We are looking for a motivated student to contribute to the integration of our LLM-based voice control interface into a robot. Ultimately, we are targeting exoskeletons for rehabilitation therapy. This work will focus on a demonstration robot, likely a Novint Falcon haptic system. You will build Model Context Protocol (MCP) servers (or similar) to integrate with both robot controllers and the AI and you will help handle the connection to the server where we are hosting the LLM.
Keywords
rehabilitation, therapy, exoskeleton, LLM, MCP, integration, robot, interface, voice control
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-18 , Earliest start: 2026-06-22 , Latest end: 2026-12-31
Organization Sensory-Motor Systems Lab
Hosts von Max-Ole
Topics Medical and Health Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Mechanophores for advanced wearable strain and pressure sensors
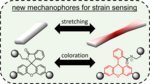
The goal of the project is to synthesize and characterize a number of small molecules capable of acting as mechanophore addition to various polymers. These polymers would then be used as wearable strain or pressure sensors.
Keywords
mechanophore, polymer, wearable, sensor, color, strain, pressure
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-17
Organization Biomedical and Mobile Health Technology Lab
Hosts Shokurov Aleksandr
Topics Engineering and Technology , Chemistry
Smart Microcapsules for Biomedical Advances

This Master's thesis/semester project focuses on the microfluidic fabrication of microcapsules with multi-environmental responsiveness. The aim is to develop microcapsule-based microrobots capable of adapting to various environmental cues. We envision that these microrobots will be used for complex tasks in biomedical applications.
Keywords
Microfluidics, Microcapsules, Microrobotics, Responsive Polymers, Biomedical Engineering
Labels
Semester Project , Internship , Master Thesis , Student Assistant / HiWi , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-06-16 , Earliest start: 2026-09-01
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Medical and Health Sciences , Engineering and Technology , Chemistry
Vision-Based Tactile Sensor for Humanoid Hands (in collaboration with Soft Robotics Lab)

Humanoid robots require tactile sensing to achieve robust dexterous manipulation beyond the limits of vision-based perception. This project develops an event-based tactile sensor to provide low-power, high-bandwidth force estimation from material deformation, with the goal of integrating it into a human-scale robotic hand.
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-16 , Earliest start: 2026-01-05 , Latest end: 2026-12-01
Organization Robotics and Perception
Hosts Pellerito Roberto
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Time-continuous Facial Motion Capture Using Event Cameras

Traditional facial motion capture systems, including marker-based methods and multi-camera rigs, often struggle to capture fine details such as micro-expressions and subtle wrinkles. While learning-based techniques using monocular RGB images have improved tracking fidelity, their temporal resolution remains limited by conventional camera frame rates. Event-based cameras present a compelling solution, offering superior temporal resolution without the cost and complexity of high-speed RGB cameras. This project explores the potential of event-based cameras to enhance facial motion tracking, enabling the precise capture of subtle facial dynamics over time.
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-16 , Earliest start: 2025-03-23 , Latest end: 2025-12-31
Organization Robotics and Perception
Hosts Pellerito Roberto
Topics Engineering and Technology
Rethinking RNNs for Neuromorphic Computing and Event-based Vision

This thesis develops hardware-optimized recurrent neural network architectures with novel parallelization and kernel-level strategies to efficiently process event-based vision data for real-time neuromorphic and GPU-based applications.
Keywords
Recurrent Neural Networks (RNNs), LSTMs, GRUs, Event-Based Vision, Neuromorphic Computing, Hardware-Aware Optimization, Parallelization, Custom Kernels, GPU Acceleration, Sparse Data Processing, Real-Time Inference, Event Cameras
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-15
Organization Robotics and Perception
Hosts Zubic Nikola
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Event Representation Learning for Control with Visual Distractors

This project develops event-based representation learning methods for control tasks in environments with visual distractors, leveraging sparse, high-temporal-resolution event data to improve robustness and efficiency over traditional frame-based approaches.
Keywords
Event-based vision, representation learning, control policies, reinforcement learning, visual distractors, high-dynamic range, motion blur, sparse data, robust perception, locomotion, navigation.
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-15
Organization Robotics and Perception
Hosts Zubic Nikola
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Vision-based Navigation in Dynamic Environment via Reinforcement Learning

In this project, we are going to develop a vision-based reinforcement learning policy for drone navigation in dynamic environments. The policy should adapt to two potentially conflicting navigation objectives: maximizing the visibility of a visual object as a perceptual constraint and obstacle avoidance to ensure safe flight.
Keywords
Reinforcement Learning, Computer Vision, Drones
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-15 , Earliest start: 2026-05-01 , Latest end: 2026-12-31
Organization Robotics and Perception
Hosts Xing Jiaxu
Topics Engineering and Technology
Reinforcement Learning with World Models

Explore and develop model-based RL algorithms.
Keywords
Reinforcement Learning, Model-Based RL, World Models
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-15 , Earliest start: 2026-07-01 , Latest end: 2027-03-31
Organization Robotics and Perception
Hosts Geles Ismail
Topics Information, Computing and Communication Sciences , Engineering and Technology
Event‑based Temporal Segmentation & Tracking

Event cameras are revolutionary sensors that capture pixel-level illumination changes with microsecond latency, providing significant advantages in high-speed and high-dynamic-range scenarios where traditional cameras suffer from motion blur. Recently, large-scale foundational segmentation models have been successfully adapted to the event domain. However, these current approaches remain constrained to per-frame analysis, treating continuous event streams as isolated, static snapshots and ignoring temporal consistency. At the same time, existing event-based methods for moving object segmentation can isolate motion but fail to maintain instance identity over time—they can segment moving pixels, but they cannot "track" specific objects. This project aims to bridge the gap between static foundational segmentation and dynamic motion analysis by developing the first comprehensive tracker for event cameras. The objective is to design a system capable of not only segmenting arbitrary objects but also maintaining their identity consistently across long, high-speed sequences. The student will extend current spatial feature adaptation strategies to support temporal identity, effectively transforming a frame-by-frame instance segmenter into a robust Video Object Segmentation (VOS) tracker. Furthermore, to handle severe object occlusions and rapid, erratic motion, the project will explore sparse temporal memory mechanisms that prevent identity-switching. Finally, to rigorously test the system's reliability, the student will establish a novel benchmark for dense segmentation in extreme edge cases, such as night driving with severe glare and rapid evasive maneuvers.
Keywords
Event-based Segmentation, Segment and Track Anything, Perception.
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-15 , Earliest start: 2026-04-01 , Latest end: 2026-12-31
Organization Robotics and Perception
Hosts Pellerito Roberto
Topics Engineering and Technology
Long-Horizon Learning for Agile Autonomous Drone Racing

This thesis investigates how long-horizon sequence modeling can improve autonomous drone racing. The project focuses on developing learning-based control methods that enable drones to reason over time, adapt to rapidly changing environments, and make high-speed decisions under dynamic constraints.
Keywords
Drone Racing, Reinforcement Learning, Long Sequence Modeling, State-Space Models, Autonomous Navigation, Robot Learning, Optimal Control, Agile Robotics, Dynamical Systems, Machine Learning, High-Speed Flight
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-15
Organization Robotics and Perception
Hosts Zubic Nikola
Topics Information, Computing and Communication Sciences , Engineering and Technology
Underwater Jellyfish Robot: Design, Modeling, and Control

In this project, the student would help a PhD to finish a work involving an underwater robot that is inspired by jellyfish. A first prototype exists, yet many changes need to be made to the hardware before proper modeling and control can be applied.
Keywords
Soft robot, underwater, mechanical design.
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-10 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Michelis Mike , Katzschmann Robert, Prof. Dr.
Topics Engineering and Technology
Deployment and Programming of a Dextrous Robotic Hand to Study the Effect of Abduction in Robotic Dexterity

Deployment and programming of CyberGriper2, a dextrous robotic hand with coordinated finger adduction/abduction developed at the Soft Robotic Lab (SRL) at ETH Zürich, to investigate the effect of coupled ab/d motion on dexterous manipulation. Building on prior static grasping results that demonstrated significant improvements in grasp coverage, dexterity is evaluated dynamically using POMDAR (A Benchmark of Dexterity for Anthropomorphic Robotic Hands)¹, a systematic benchmarking framework grounded in manipulation and grasp taxonomies. The hand is evaluated first via teleoperation and subsequently through a learned autonomous controller, enabling direct comparison of dexterity across different hand architectures.
Keywords
Dexterous manipulation, robotic hand, abduction, teleoperation, motion retargeting, dexterity benchmark, autonomous manipulation, learning from demonstration
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-10 , Earliest start: 2026-06-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Katzschmann Robert, Prof. Dr. , Appius Aurel , Hinchet Ronan
Topics Engineering and Technology
Does Haptic Feedback Help You Learn? Evaluating Vibrotactile Feedback for Fine Motor Skill Acquisition

On touchscreen devices, vibration is usually just an alert, which aims at communicating information but also feels disruptive. However vibration coupled to your movement feels like the texture or resistance of the surface you are exploring with your finger. We are looking for a motivated student to investigate whether this kind of vibration feedback, which feels like material properties of a surface can help people learn fine motor skills faster and retain them better?
Keywords
motor learning, vibrotactile feedback, touchscreen, haptics, fine motor skill, skill acquisition, human-computer interaction.
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-10 , Earliest start: 2026-06-15 , Latest end: 2027-01-15
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , University of Zurich , ETH Competence Center - Competence Center for Rehabilitation Engineering and Science (RESC)
Organization Sensory-Motor Systems Lab
Hosts Sabnis Nihar
Topics Information, Computing and Communication Sciences , Engineering and Technology
Cuffless blood pressure estimation through wearable sensors and AI

This project explores machine learning methods to estimate blood pressure from wearable photoplethysmography signals, progressing from single-site public datasets to multi-site measurements to enhance accuracy through spatial cardiovascular dynamics.
Keywords
blood pressure assessment, biomedical signal analysis, data science, medical technologies, and digital health
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-06-08 , Earliest start: 2026-05-18 , Latest end: 2027-02-28
Organization Biomedical and Mobile Health Technology Lab
Hosts Otesteanu Corin, Dr , Dominguez Federico
Topics Information, Computing and Communication Sciences
Connecting an AI Voice Interface to a Rehabilitation Robot

We have developed an LLM-based voice interface for rehabilitation robots and are looking for a student to help connect it to a clinical exoskeleton. You will build an auto-clicker that reads the robot's user interface and performs actions automatically, enabling the AI assistant to control the robot through its existing software. The project combines AI, software engineering, automation, and rehabilitation robotics.
Keywords
rehabilitation, therapy, exoskeleton, LLM, integration, certification, robot, interface, voice control
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-05 , Earliest start: 2026-07-06 , Latest end: 2027-01-31
Organization Sensory-Motor Systems Lab
Hosts von Max-Ole
Topics Medical and Health Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Master Thesis: Development of a Customized Knee Orthosis for Osteoarthritis

Osteoarthritis (OA) presents a significant challenge in healthcare, necessitating innovative solutions to alleviate pain, enhance mobility. This thesis documents the research and development journey of an OA knee orthosis within the Spinal Cord and Artificial Intelligence Lab (SCAI-Lab) at ETH Zurich. This thesis is a close collaboration between the ORTHO-TEAM Group and the SCAI-Lab at ETH Zurich. The collaboration offers a unique exchange of expertise and resources between industry and academia. Together, we aim to make meaningful progress in the field of and empower students to make valuable contributions to their academic pursuits.
Keywords
Osteo Arthritis, Orthosis, Biomechanics, AI, Medical Data, Healthcare
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-04 , Earliest start: 2026-08-01 , Latest end: 2027-02-28
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , Empa , University of Basel , University of Berne , Zurich University of Applied Sciences , Università della Svizzera italiana , Hochschulmedizin Zürich , Lucerne University of Applied Sciences and Arts , Institute for Research in Biomedicine , CSEM - Centre Suisse d'Electronique et Microtechnique
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Paez Diego, Dr. , Paez Diego, Dr.
Topics Medical and Health Sciences , Engineering and Technology
Human Communication Framework and Therapists' Needs for Instructing Rehabilitation Robots

This work will focus on the human side of human-machine-interaction. We are looking for a motivated student to contribute to the conceptualization of our voice control interface. We are targeting exoskeletons for rehabilitation therapy and wish to make them easier to control. To do so, we must understand the needs of the physio-therapists. We must identify their expectations towards robot interfaces and how they usually communicate with their patients to convey their intentions. As part of this project, you will interview clinicians, join them during therapy sessions, and formalize the findings.
Keywords
communication, intention, psychology, rehabilitation, therapy, robot, exoskeleton, AI, interface, voice control
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-03 , Earliest start: 2026-06-07 , Latest end: 2026-11-30
Organization Sensory-Motor Systems Lab
Hosts von Max-Ole
Topics Medical and Health Sciences , Journalism, Librarianship and Curatorial Studies , Information, Computing and Communication Sciences , Behavioural and Cognitive Sciences , Studies in Human Society
Dynamic and Cyclic Actuation for Improved Endoluminal Navigation of Soft Continuum Robots

We want to explore the use of dynamic/cyclic motions to improve the navigation of robotic catheters, guidewires or endoscopes for endoluminal procedures. This project aims to build catheter prototypes and an experimental setup to evaluate this concept in vitro using anatomical models and state-of-the-art electromagnetic navigation systems to induce these motions magnetically. Gaining a theoretical understanding on this approach through simulated results can be explored as an alternative or as a complement.
Keywords
Mechatronics, Hardware Design, Programming, Simulation
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-03
Applications limited to ETH Zurich
Organization Medical Robotics Lab
Hosts Boehler Quentin
Topics Engineering and Technology
Evaluation of Biomechanical Models Built Using Lokomat Robotic Data

A semester project or internship opportunity with the Sensory-Motor Systems Lab at ETH Zürich. This work will support ongoing work in the EU TAILOR MSCA Doctoral Network which aims to optimise and elevate robotic gait rehabilitation interventions. The work will specifically focus on the evaluation of the quality and capacity of human biomechanical models that are built from data exported from the Lokomat during robotic rehabilitation sessions. The overarching goal is to reduce the extent to which a robot's presence interferes with how a therapist assesses a patient and provide novel metrics to aid in clinical decision making. *Supervision will be remote from September to December 2026 due to a scheduled international research stay of the main supervisor*
Keywords
OpenSim, Biomechanical Modelling, Lokomat, Rehabilitation Robots
Labels
Semester Project , Internship , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-02 , Earliest start: 2026-07-06 , Latest end: 2027-02-28
Organization Sensory-Motor Systems Lab
Hosts Thirlwell Florence
Topics Medical and Health Sciences , Engineering and Technology
Social VLA for Socially-Aware Robot Navigation in Human-Centered Environments

This project aims to develop a Social Vision-Language-Action framework for robot navigation in crowded and human-centered environments. Unlike conventional navigation methods that mainly optimize collision avoidance and goal reaching, the proposed system will explicitly reason about human social interactions, group formations, pedestrian intent, personal space, and socially acceptable passing or yielding behaviors.
Keywords
Social navigation; Vision-Language-Action models; socially-aware robotics; human-robot interaction; robot navigation; crowd-aware navigation; trajectory generation; social reasoning; robot learning; embodied AI.
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-02 , Earliest start: 2026-09-07 , Latest end: 2027-04-30
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Alyassi Rashid , Alyassi Rashid , Alyassi Rashid
Topics Engineering and Technology
Bidexterous Manipulation with Tactile Feedback

Humanoid robots are increasingly equipped with dexterous hands that enable them to interact with objects in more flexible, human-like ways. However, robust manipulation remains challenging, especially when relying only on external perception. The BrainCo Revo 2 hands provide tactile sensing on the fingertips, opening the possibility of combining touch with exteroceptive observations for object interaction. In this project, the student will develop a manipulation pipeline for tabletop tasks using the G1 humanoid and BrainCo dexterous hands. The project will study how combining exteroceptive perception with tactile feedback can improve manipulation performance. The final goal is to build and evaluate a first visuo-tactile manipulation pipeline for a bimanual dexterous platform, with a focus on understanding how tactile feedback can improve object-centric manipulation. **References** [1] Tac2Motion: https://dexterous-humanoid-manipulation.github.io [2] VT-Refine: https://binghao-huang.github.io/vt_refine/ [3] https://arxiv.org/pdf/2412.13157
Keywords
Humanoid Manipulation, Dexterous Hands, Tactile Sensing, Visuo-Tactile Fusion, Robot Learning
Labels
Master Thesis
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-30 , Earliest start: 2026-06-01 , Latest end: 2027-03-01
Organization Robotic Systems Lab
Hosts Bhardwaj Arjun
Topics Information, Computing and Communication Sciences , Engineering and Technology
Learning Robust Agile Flight via Adaptive Curriculum

This project focuses on developing robust reinforcement learning controllers for agile drone navigation using adaptive curricula. Commonly, these controllers are trained with a static, pre-defined curriculum. The goal is to develop a dynamic, adaptive curriculum that evolves online based on the agents' performance to increase the robustness of the controllers.
Keywords
Reinforcement Learning, Drones
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-29 , Earliest start: 2026-05-01 , Latest end: 2026-12-31
Organization Robotics and Perception
Hosts Xing Jiaxu
Topics Engineering and Technology
Multimodal EEG-fNIRS Brain Imaging
Hardware Development, Clinical Study Data Collection, Multimodal Data Analysis
Labels
Semester Project , Internship , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-29 , Earliest start: 2026-06-01 , Latest end: 2026-12-31
Organization Rehabilitation Engineering Lab
Hosts Schönhammer Josef
Topics Medical and Health Sciences , Engineering and Technology , Behavioural and Cognitive Sciences
Development of Regulatory Documentation for a Novel Neurorehabilitation Device: Preparation for FDA and Swissmedic Compliance
Stroke is a leading cause of long-term disability, affecting millions annually and necessitating innovative approaches to rehabilitation. The Rehabilitation Engineering Laboratory (RELab) at ETH Zurich is developing a novel closed-loop neurorehabilitation device that integrates real-time motion tracking with non-invasive brain stimulation to enhance neural plasticity and promote motor recovery in stroke patients. To advance this technology toward clinical trials, comprehensive regulatory documentation is essential to meet the stringent requirements of the U.S. Food and Drug Administration (FDA) and Swissmedic. This project focuses on preparing an Investigational Device Exemption (IDE) application for the FDA and supporting documentation for Swissmedic compliance, including technical descriptions, risk analyses, and clinical study protocols. The student will conduct literature reviews, draft regulatory documents, and support risk management in accordance with ISO 14971, contributing to the device’s regulatory pathway. This work offers a unique opportunity to gain expertise in medical device regulation, bridging biomedical engineering and neuroscience, and advancing a transformative solution for stroke rehabilitation.
Keywords
regulatory affairs, medical device, non-invasive brain stimulation, FDA, Swissmedic, investigational device exemption, IDE, stroke rehabilitation, compliance
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-28 , Earliest start: 2026-01-01 , Latest end: 2026-10-01
Organization Rehabilitation Engineering Lab
Hosts Quast Max , Donegan Dane , Viskaitis Paulius
Topics Medical and Health Sciences , Engineering and Technology
Online Semantic Gaussian Splatting and RL for Mobile Robots

In this project, we aim to extend a Gaussian Splatting framework by integrating online semantics and build an RL framework that draws from both geometry and semantics in real time. We would like to explore how these semantically enriched representations can improve generalizable robot learning and sim-to-real transfer on agile mobile robots.
Keywords
Gaussian Splatting, Semantics, VFM, Reinforcement Learning, 3D Vision
Labels
Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-27 , Earliest start: 2026-06-08
Organization Robotic Systems Lab
Hosts Gawel Abel
Topics Information, Computing and Communication Sciences
Developing Multi-Functional Microrobots Using Microfluidic Chips (3M project)
We are looking for a motivated Master’s student to join an exciting interdisciplinary thesis project, collaborating between the Multi-Scale Robotics Lab (D-MAVT) and the deMello group (D-CHAB) at ETH Zurich. This project focuses on creating a novel microfluidic-based bottom-up method to fabricate multifunctional microrobots. This innovative approach seeks to revolutionize microrobot fabrication, opening the door to diverse new applications.
Keywords
Microfluidics, Self-assembly, Microrobots
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-15 , Earliest start: 2026-09-14
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Engineering and Technology , Chemistry
3D Scene Completion in Gaussian Splatting
Robots rarely get the luxury of a perfect map. During exploration, they are constantly fighting against "unknowables" such as occlusions, shadows, and unvisited corners that leave gaps in their understanding of the world. This project aims to address this by implementing 3D Gaussian Scene Completion, where the system proactively fills unobserved regions with learned geometric priors.
Keywords
3D Gaussian Splatting Scene reconstruction Scene completion 3D Graphics
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-14 , Earliest start: 2026-05-18
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Wilder-Smith Max
Topics Information, Computing and Communication Sciences
Event Cameras for Agile Drone 3D Perception

Fast drones often move too quickly for conventional cameras, resulting in motion blur and unreliable 3D perception. This project investigates how event cameras, which capture microsecond-level brightness changes, can help drones “see clearly” during aggressive flight. The student will develop learning-based methods that combine standard images, event data, and motion cues to recover sharp visual information and reconstruct the 3D environment.
Keywords
Event cameras, Aerial robotics, 3D reconstruction, dynamic scenes, event-based vision
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-14 , Earliest start: 2026-05-14
Organization Robotics and Perception
Hosts Zou Rong
Topics Information, Computing and Communication Sciences
Learning Rapid UAV Exploration with Foundation Models

Recent research has demonstrated significant success in integrating foundational models with robotic systems. In this project, we aim to investigate how these foundational models can enhance the vision-based navigation of UAVs. The drone will utilize learned semantic relationships from extensive world-scale data to actively explore and navigate through unfamiliar environments. While previous research primarily focused on ground-based robots, our project seeks to explore the potential of integrating foundational models with aerial robots to enhance agility and flexibility.
Keywords
Visual Navigation, Foundation Models, Drones
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-12 , Earliest start: 2026-01-25 , Latest end: 2027-03-31
Organization Robotics and Perception
Hosts Xing Jiaxu
Topics Engineering and Technology
Nature-Derived Microrobots: From Materials to Motion

We invite applications for a Master's thesis / semester project that focuses on the fabrication of microrobots with materials from the nature. Using our developed technique, this project will explore how different shapes influence their control behaviors in bio-fluids. This research aims to advance biomedical technologies, particularly in targeted drug delivery and minimally invasive procedures.
Keywords
Microrobotics, Fluid Dynamics, Biomedical Devices
Labels
Semester Project , Master Thesis , Student Assistant / HiWi , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-09-01
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Engineering and Technology , Chemistry
Microrobots Made from Droplets

We invite applications for a Master's thesis / semester project that focuses on the fabrication of microrobots with custom shapes. Using our developed droplet printing technique, this project will explore how different microrobot shapes, created by different magnetic fields and materials, influence their control behaviors in blood vessels. This research aims to advance biomedical technologies, particularly in targeted drug delivery and minimally invasive procedures.
Keywords
Microrobotics, Inkjet Printing, Soft Materials, Biomedical Devices
Labels
Semester Project , Master Thesis , Student Assistant / HiWi , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-09-14
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Engineering and Technology , Chemistry
Computational Modeling of Muscle Dynamics for Biohybrid Robots
This research aims to advance biohybrid robotics by integrating living biological components with artificial materials. The focus is on developing computational models for artificial muscle cells, a critical element in creating biohybrid robots. Challenges include modeling the complex and nonlinear nature of biological muscles, considering factors like elasticity and muscle fatigue, as well as accounting for fluid-structure interaction in the artificial muscle's environment. The research combines first principle soft body simulation methods and machine learning to improve understanding and control of biohybrid systems.
Keywords
Biohybrid Robotics, Computational Models, Soft Body Simulation, Finite Element Method (FEM), Muscle Dynamics, Soft Robotics
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Mekkattu Manuel , Katzschmann Robert, Prof. Dr.
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Biology , Physics
GPU Acceleration of Soft Robot Modeling: Enhancing Performance with CUDA

We are enhancing soft robot modeling by developing a GPU-accelerated version of our FEM-based framework using CUDA. This research focuses on optimizing parallel computations to significantly speed up simulations, enabling larger problem sizes and real-time control. By improving computational efficiency, we aim to advance soft robotics research and facilitate more detailed, dynamic simulations.
Keywords
Soft Body Simulation, high-performance computing, GPU programming, Parallel Computing, Finite Element Method (FEM), Multiphysics Simulation
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Katzschmann Robert, Prof. Dr. , Mekkattu Manuel
Topics Information, Computing and Communication Sciences , Engineering and Technology
Advancing Soft Robot Modeling: Integrating Physics, Optimization, and Control

We are advancing soft robot simulation with FEM and energy-based methods to model complex, adaptive behaviors. This research entails developing the framework to support diverse designs, integrate new physics models, and optimize performance, enabling enhanced control and real-world applications of soft robots.
Keywords
Soft Robotics, Finite Element Method (FEM), Physical Modeling, Benchmarking, Optimization, Multiphysics Simulation, Sim-to-Real
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Mekkattu Manuel , Katzschmann Robert, Prof. Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
Insights into the Cellular Bio-Interaction and Biological Effects of Metal–Organic Frameworks

Metal–Organic Frameworks (MOFs) are a versatile class of highly porous materials with tunable structural and functional properties, making them promising candidates for biomedical applications such as drug delivery, imaging, and theranostics.In this project, different MOFs will be synthesized using various metal nodes and organic linkers and their physicochemical properties will be investigated. Based on previous biocompatibility studies performed on different mammalian cell models (immune, epithelial, fibroblast, neural, and cancer cells), the project aims to gain deeper insights into the biological activity of selected MOFs. The interaction between MOFs and cells will be studied through cellular uptake experiments, cytotoxicity evaluation, and analysis of the molecular pathways involved in cell death.
Keywords
Metal-Organic Frameworks (MOFs), Biocompatibility assays, Material characterization techniques, SDS and WesternBlot analysis
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-05-11 , Latest end: 2027-05-11
Organization Multiscale Robotics Lab
Hosts Accursi Martina
Topics Engineering and Technology , Chemistry , Biology
Fine-Tuning Multimodal Reasoning Models for Affordance and Manipulativity Prediction in Robotic Manipulation

This project investigates whether reasoning-oriented multimodal models such as Gemma 4 can be fine-tuned to predict task-relevant affordances and manipulability for robotic manipulation. Given visual observations and high-level instructions, the model will identify actionable object parts, infer their functional suitability, and estimate how effectively a robot can interact with them using its own embodiment. Predictions may include affordance classes, contact regions, or manipulability scores learned from demonstrations, simulation, or robot execution data. These outputs will support interaction selection directly or guide downstream planners and control policies. The approach will be evaluated in simulation and on real robotic platforms to improve task-aware manipulation success in unstructured environments.
Keywords
affordance prediction; robotic manipulation; manipulability; multimodal reasoning; vision-language models; task-aware interaction; object part affordances; embodied AI; contact region prediction; motion planning; robot learning; high-level instruction understanding
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-10 , Earliest start: 2026-05-06 , Latest end: 2027-04-08
Applications limited to ETH Zurich , University of Zurich
Organization Robotic Systems Lab
Hosts Zurbrügg René , Werner Lennart
Topics Engineering and Technology
Silver Nanoparticle-Based Platforms for Thermal Modulation and Glucose Sensing in Engineered Muscle Tissues

This project aims to develop silver nanoparticle-based systems as multifunctional, responsive materials for engineered skeletal muscle tissues. The work will explore their use in localized thermal modulation of cellular activity and as embedded sensors for glucose monitoring within tissue constructs. By integrating nanomaterials with biofabricated muscle systems, the project seeks to create advanced platforms for controlled stimulation and real-time metabolic sensing.
Keywords
silver nanoparticles, nanomaterials, thermal modulation, glucose sensing, skeletal muscle tissue, biofabrication, biosensors, nanomedicine, tissue engineering, bio-hybrid systems.
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-06 , Earliest start: 2026-05-06 , Latest end: 2026-10-31
Organization Soft Robotics Lab
Hosts Filippi Miriam
Topics Medical and Health Sciences , Biology
Programmable Colloidal Crystal Engineering of Magnetoelectric Nanoparticles via DNA Origami

MENPs are an emerging class of multifunctional nanomaterials that exhibit coupled magnetic and electric properties. In this project, MENPs will be synthesized and functionalized with DNA strands to act as programmable building for colloidal crystal assembly. This approach adapts recent advances in DNA-mediated nanoparticle self-assembly, replacing metal–organic frameworks (MOFs) with MENPs to explore new functionalities. Their structural organization will be characterized, and their functional behavior will be investigated. Particular attention will be given to how the intrinsic magnetoelectric properties of MENPs influence collective properties in the assembled state. The project aims to provide insight into the relationship between nanoparticle design, assembly architecture, and emergent material properties, potentially enabling applications in catalysis, sensing, and responsive materials.
Keywords
Magnetoelectric Nanoparticles, Cobalt Ferrite, Barium Titanate,Surface engineering, DNA-programmed colloidal crystals
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-06 , Earliest start: 2026-06-01 , Latest end: 2027-05-01
Organization Multiscale Robotics Lab
Hosts Accursi Martina
Topics Engineering and Technology
Encasing Bio-actuators for Real-World Usability of Bio-hybrid Robots

This project aims to develop 3D muscle bioactuators integrated with smart protective encasing systems for operation beyond standard in vitro conditions. Building on existing platforms for thermal regulation and nutrient supply, the project will focus on designing responsive encapsulation strategies capable of adapting to environmental cues, such as pH variations, to regulate exchange with the surroundings. These systems will enable more robust, functional bioactuators for applications in bio-hybrid robotics and translational bioengineering.
Keywords
skeletal muscle, bioactuators, bio-hybrid robotics, stimuli-responsive biomaterials, encapsulation systems, chitosan, pH-responsive materials, biofabrication, tissue engineering
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-06 , Earliest start: 2026-05-06 , Latest end: 2026-10-31
Organization Soft Robotics Lab
Hosts Filippi Miriam
Topics Engineering and Technology , Biology
Constrained Reinforcement Learning for Robot Navigation

This project proposes a Constrained Reinforcement Learning (CRL) framework for social robot navigation that explicitly enforces safety, smoothness, and social-distance constraints. Unlike traditional reward-based RL, the approach integrates multiple constraints and a safety filter to ensure robust and human-compliant navigation across varying crowd conditions.
Keywords
Constrained Reinforcement Learning (CRL) Social Navigation Robot Navigation Safety Constraints Human-Aware Navigation
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-05 , Earliest start: 2026-09-01 , Latest end: 2027-04-30
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Alyassi Rashid , Alyassi Rashid , Alyassi Rashid
Topics Engineering and Technology
Learning-based Mapping for Robot crowd-aware Navigation

Learning-based crowd mapping predicts global crowd density and flow from sparse robot observations, enabling crowd-aware global planning beyond local perception. The approach integrates multi-modal priors (e.g., calendars via LLMs) to capture temporal patterns and is validated in simulation and real-world navigation tasks.
Keywords
SLAM Crowd mapping Robot navigation Global planning LLMs Spatio-temporal modeling
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-05 , Earliest start: 2026-09-01 , Latest end: 2027-03-31
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Alyassi Rashid , Alyassi Rashid , Alyassi Rashid
Topics Engineering and Technology
Reinforcement Learning for Crowd-Aware Robot Navigation

This project focuses on improving RL-based social navigation by creating a simulation framework with diverse and realistic human behaviors. Current RL methods often train on simplified crowds where all pedestrians behave similarly, which limits generalization in real-world environments.
Keywords
RL, Robot Navigation
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-05 , Earliest start: 2026-09-01 , Latest end: 2027-03-31
Applications limited to ETH Zurich
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Alyassi Rashid , Alyassi Rashid , Alyassi Rashid
Topics Engineering and Technology
HASEL-Driven Rotation Drive Design and Testing

Master’s Thesis Opportunity at ETH Zurich We’re exploring a new kind of rotational actuator based on stacked HASEL (Hydraulically Amplified Self-Healing Electrostatic) actuators. The goal is to convert the linear motion of soft actuators into continuous rotation using a new mechanism we have developed. We want to outperform traditional motors in specific power, quiet operation, and adaptability all while eliminating the need for magnets from the motor system. This work will be in collaboration with colleagues at Northeastern University in Boston MA.
Keywords
electrostatic actuators, rotational motors, HASEL
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-04-13 , Earliest start: 2026-05-01 , Latest end: 2027-03-31
Organization Soft Robotics Lab
Hosts Toshimitsu Yasunori , Katzschmann Robert, Prof. Dr.
Topics Engineering and Technology
Master Thesis: Autonomous Robotic Cardiac Catheters - Project Abroad at Boston Children's Hospital, Harvard Medical School

We are developing advanced robotic catheter systems to enable precise heart valve repair and the treatment of cardiac arrhythmias. Robotic platforms have the potential to shorten the learning curve for complex beating‑heart procedures and provide a foundation for introducing autonomous functionality. Key elements of this work include the development of autonomous control strategies, integration of therapeutic devices, and comprehensive testing in anatomical and preclinical animal models. Preferred skill sets include experience in robotics, machine learning, control systems, and prototyping.
Keywords
robotic cardiac catheters,valve repair, robotic treatment of arrythmia
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-02-26 , Earliest start: 2026-04-01 , Latest end: 2027-06-01
Organization Multiscale Robotics Lab
Hosts Gantenbein Valentin
Topics Medical and Health Sciences , Engineering and Technology
Master Thesis: Transcatheter Heart Valve Repair and Replacement Devices – Project Abroad at Boston Children's Hospital, Harvard Medical School
Transcatheter interventions offer a less invasive alternative to open-heart surgery by enabling the delivery of therapeutic devices that mimic traditional surgical repair or replacement of cardiac valves. Our work focuses on developing novel tools and devices for both valve repair and valve replacement procedures. These efforts rely on innovative design approaches, creative problem‑solving, and deep expertise in prototyping and experimental evaluation to advance next‑generation transcatheter therapies.
Keywords
transcatheter procedures, heart valve repair, replacement devices
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-02-26 , Earliest start: 2026-03-01 , Latest end: 2027-01-01
Organization Multiscale Robotics Lab
Hosts Gantenbein Valentin
Topics Medical and Health Sciences , Engineering and Technology
Exploring Exotic Wheels For Wheeled-Legged Robots

Wheeled-legged robots combine the advantages of wheels, i.e., efficient high-speed locomotion, with obstacle negotiation and rough terrain capabilities of legs. In this study, different exotic wheel concepts should be researched, evaluated, and possibly implemented on a real robot to potentially boost efficiency, manipulation, and functionality.
Keywords
Wheeled-Legged Robots, Wheels, Robotics, Mechanical and Hardware Design, Manipulation, Tires
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-02-18
Organization Robotic Systems Lab
Hosts Klemm Victor
Topics Information, Computing and Communication Sciences , Engineering and Technology
Hierarchical Reasoning Models (HRM) for Robotics

How to properly deal with long-horizon tasks is still an unsolved problem in robot learning. Recent advances in reasoning models present Hierarchical Reasoning Models (HRM), inspired by the hierarchical and multi-timescale processing in the human brain. This fairly open project should implement and test state of the art solutions for long horizon planning that require reasoning in the context of robotics, especially robotics motion control.
Keywords
Robot learning, hierarchical reasoning, machine intelligence, long-horizon planning
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-02-18
Organization Robotic Systems Lab
Hosts Klemm Victor
Topics Information, Computing and Communication Sciences , Engineering and Technology
Master’s Thesis with Unitree G1 Humanoid

If you’re looking for a Master’s thesis and are interested in working with the Unitree G1 humanoid robot, feel free to reach out to check whether we currently have an available project. Possible thesis topics include modern learning-based methods such as Reinforcement Learning (RL), Vision-Language-Action approaches (VLAs), and related techniques for humanoid robotics. If you already have a specific project idea in mind, you’re also very welcome to contact us to discuss it. Please note that, due to high demand within ETH, thesis projects in this area are currently restricted to students enrolled at ETH.
Keywords
Humanoid Robot, Reinforcement Learning, VLA
Labels
Master Thesis
Contact Details
More information
Published since: 2026-02-10
Applications limited to ETH Zurich
Organization Mobile Robotics Lab
Hosts Bosshart Micha , Näf Joshua , Hansson Alexander
Topics Information, Computing and Communication Sciences