Bachelor
Bachelor Theses at IRIS
HandoverNarrate: Language-Guided Task-Aware Motion Planning for Handovers with Legged Manipulators

This project addresses the challenge of task-oriented human-robot handovers, where a robot must transfer objects in a manner that directly facilitates the human’s next action. In our prior work, we demonstrated that robots can present objects appropriately for immediate human use by leveraging large language models (LLMs) to reason about task context. However, integrating task-specific physical constraints—such as ensuring a full mug remains upright during transport—into the motion planning process remains unsolved. In this project, we aim to extend our existing motion planning framework for legged manipulators by incorporating such constraints. We propose using LLMs to dynamically generate task-aware constraint formulations based on high-level task descriptions and object states. These constraints will then be used to adjust the cost function of the model predictive controller in real time, enabling more context-sensitive and physically appropriate handovers.
Keywords
language-guided motion planning, legged robotics, human-robot collaboration
Labels
Semester Project , Bachelor Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2025-05-21
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Tulbure Andreea
Topics Information, Computing and Communication Sciences
Development and Testing of Electrical Systems for a SmartVNS Docking Station with Focus on Wireless Data Management

We are looking for an enthusiastic electrical/firmware engineer to design and implement the electrical and firmware aspects of a docking station for the SmartVNS device. The station will charge the device components (pulse generator and wrist motion tracker) and pull data from the pulse generator and motion tracker, uploading it to an online server via Wi-Fi. This project will also involve testing the reliability of data transfer and power systems under real-world conditions, providing valuable insights into the practical application of this technology.
Keywords
Electrical, embedded, electronic, engineering, biomedical
Labels
Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2025-05-19 , Earliest start: 2024-08-18 , Latest end: 2025-10-01
Organization Rehabilitation Engineering Lab
Hosts Viskaitis Paulius
Topics Information, Computing and Communication Sciences , Engineering and Technology
Development of Regulatory Documentation for a Novel Neurorehabilitation Device: Preparation for FDA and Swissmedic Compliance
Stroke is a leading cause of long-term disability, affecting millions annually and necessitating innovative approaches to rehabilitation. The Rehabilitation Engineering Laboratory (RELab) at ETH Zurich is developing a novel closed-loop neurorehabilitation device that integrates real-time motion tracking with non-invasive brain stimulation to enhance neural plasticity and promote motor recovery in stroke patients. To advance this technology toward clinical trials, comprehensive regulatory documentation is essential to meet the stringent requirements of the U.S. Food and Drug Administration (FDA) and Swissmedic. This project focuses on preparing an Investigational Device Exemption (IDE) application for the FDA and supporting documentation for Swissmedic compliance, including technical descriptions, risk analyses, and clinical study protocols. The student will conduct literature reviews, draft regulatory documents, and support risk management in accordance with ISO 14971, contributing to the device’s regulatory pathway. This work offers a unique opportunity to gain expertise in medical device regulation, bridging biomedical engineering and neuroscience, and advancing a transformative solution for stroke rehabilitation.
Keywords
regulatory affairs, medical device, non-invasive brain stimulation, FDA, Swissmedic, investigational device exemption, IDE, stroke rehabilitation, compliance
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2025-05-19 , Earliest start: 2025-05-25 , Latest end: 2025-08-01
Organization Rehabilitation Engineering Lab
Hosts Donegan Dane
Topics Medical and Health Sciences , Engineering and Technology
Strategic Financial Modelling and Business Plan Development for a Breakthrough Neurorehabilitation Device
With over 14 million stroke cases annually, the global neurorehabilitation market presents a multi-billion-dollar opportunity for innovative solutions addressing motor recovery. The Rehabilitation Engineering Laboratory (RELab) at ETH Zurich is developing a revolutionary closed-loop neurorehabilitation device that leverages motion tracking and non-invasive brain stimulation to transform stroke rehabilitation. This project aims to develop a sophisticated financial model and a strategic business plan to propel the device to market leadership. The student will conduct market analysis, build financial projections, and craft a compelling business strategy, focusing on pricing, reimbursement, and investor engagement. By delivering investor-ready materials and a scalable commercialization plan, this work will position the device for rapid market entry and long-term success, offering the student a unique opportunity to blend business strategy, entrepreneurship, and healthcare innovation.
Keywords
financial modelling, business strategy, medical device, neurorehabilitation, startup, stroke rehabilitation, entrepreneurship, market entry, investment
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Tasks
Your Profile
Contact Details
More information
Published since: 2025-05-19 , Earliest start: 2025-05-25 , Latest end: 2025-09-01
Organization Rehabilitation Engineering Lab
Hosts Viskaitis Paulius
Topics Medical and Health Sciences , Engineering and Technology , Economics , Commerce, Management, Tourism and Services
Development of Neuromuscular Biohybrid Robots

Biohybrid robots integrate living cells and synthetic components to achieve motion. These systems often rely on engineered skeletal muscle tissues that contract upon electrical stimulation for actuation. Neuromuscular-powered biohybrid robots take this concept further by integrating motor neurons to induce muscle contractions, mimicking natural muscle actuation. In our lab, we are developing neuromuscular actuators using advanced 3D co-culture systems and biofabrication techniques to enable functional macro-scale biohybrid robots.
Keywords
Tissue engineering, mechanical engineering, biology, neuroengineering, biomaterials, biohybrid robotics, 3D in vitro models, biofabrication, bioprinting, volumetric printing.
Labels
Semester Project , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2025-05-16 , Earliest start: 2025-01-15
Organization Soft Robotics Lab
Hosts Badolato Asia , Katzschmann Robert, Prof. Dr.
Topics Engineering and Technology , Biology
Feedback Optimization of Acoustic Patterning in Real Time for Bioprinter

Our project aims to enhance the ultrasound-assisted bioprinting process using real-time feedback and image processing. We have developed a transparent nozzle equipped with multiple cameras for real-time monitoring. The next steps involve integrating advanced image processing techniques, such as template matching, and implementing a feedback system to optimize the printing process. The system will be fully automated, featuring a function generator for wave creation and cooling elements. By analyzing the printing process and acoustic cell patterning with computer vision and leveraging real-time sensor feedback, we aim to dynamically optimize parameters such as frequency and amplitude for accurate and consistent pattern formation, crucial for bio applications.
Keywords
Machine learning, control and automation, 3D Printing, Ultrasound
Labels
Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2025-04-29 , Earliest start: 2025-02-01 , Latest end: 2025-09-30
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Medany Mahmoud
Topics Medical and Health Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Behavioural and Cognitive Sciences
Modelling and Optimizing the Power Budget of a Bridge-Mounted Camera System for River Waste Monitoring

In this thesis, you will contribute to the Autonomous River Cleanup (ARC) by helping develop SARA, a bridge-mounted, camera-based system for monitoring river waste. Your focus will be on modeling the system’s power dynamics to determine the ideal battery and solar panel size, and balancing runtime throughout the day with overall the system size and weight. If time allows, you will also validate your findings with tests on the real hardware.
Keywords
system modelling, power electronics, simulations
Labels
Semester Project , Bachelor Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2025-04-27 , Earliest start: 2025-05-05 , Latest end: 2025-09-30
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Elbir Emre
Topics Engineering and Technology
Thermal Protection of a Bridge-Mounted Camera System for River Waste Monitoring

The Autonomous River Cleanup (ARC) is developing SARA, the next iteration of a bridge-mounted, camera-based system to detect and measure riverine waste. Smartphones offer a compact, affordable, and powerful core for year-round monitoring but are vulnerable to shutdowns from extreme heat in summer and cold in winter. This thesis focuses on assessing these thermal challenges and designing protective solutions to ensure reliable, continuous operation.
Keywords
thermodynamics, heat transfer, testing
Labels
Semester Project , Bachelor Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2025-04-27 , Earliest start: 2025-05-05 , Latest end: 2025-09-30
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Elbir Emre
Topics Engineering and Technology
Utilizing the human body for ambient electromagnetic energy harvesting
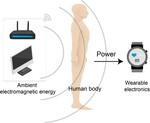
The goal of the project is to develop wearable devices, for use in environmental electromagnetic energy recovery based on human body application.
Keywords
Flexible electronics, electromagnetic energy harvesting
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2025-04-23 , Earliest start: 2025-06-20
Organization Biomedical and Mobile Health Technology Lab
Hosts Li Yuanlong
Topics Engineering and Technology
Low-Voltage Soft Actuators for Developing Untethered Robotic Systems

We are building the next generation of HALVE (Hydraulically Amplified Low-Voltage Electrostatic) actuators which are flexible, pouch-based electrostatic actuators that operate at voltages 5–10× lower than traditional soft electrostatic systems. You will help us explore novel actuator geometries, ultra-thin functional layers, and new fabrication techniques to unlock scalable, energy-efficient soft robotic systems.
Keywords
soft robotics, low-voltage actuation, dielectric elastomers, electrostatic actuators, fabrication, PVDF-TrFE-CTFE, vapor deposition, CNC sealing, mechatronics, materials science
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
More information
More information
Published since: 2025-04-07 , Earliest start: 2025-04-14 , Latest end: 2026-01-31
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne , Empa
Organization Soft Robotics Lab
Hosts Albayrak Deniz , Hinchet Ronan
Topics Engineering and Technology
Master Thesis / Project - SENSEI: Sensor Teaching in Multi-Activity classification from Video and Wearables for Wheelchair Users

In this project, we focus on continuous and quantitative monitoring of activities of daily living (ADL) in SCI individuals with the goal of identifying cardiovascular events and PI-related risk behaviors. ADLs specific to SCI patients and their lifestyles shall be discussed and narrowed down in the scope of this work, therefore an autonomous camera-based system is proposed to classify ADLs. The Current work builds on a previous project where a SlowFast network [1] was trained to identify SCI-specific classes and we aim to further improve the classification and temporal resolution for transferring to wearables' time-series data.
Keywords
Computer vision, activity classification, video processing, Deep Learning, ADL, soft-labelling, probabilistic networks
Labels
Semester Project , Course Project , Internship , Bachelor Thesis , Master Thesis , ETH for Development (ETH4D) (ETHZ) , ETH Zurich (ETHZ)
Project Background
Your Task
Your Benefits
Your Profile
Contact Details
More information
Published since: 2025-03-25 , Earliest start: 2025-05-01 , Latest end: 2026-02-28
Applications limited to EPFL - Ecole Polytechnique Fédérale de Lausanne , ETH Zurich , Zurich University of the Arts , Wyss Translational Center Zurich , University of Zurich , Zurich University of Applied Sciences , CERN , CSEM - Centre Suisse d'Electronique et Microtechnique , Department of Quantitative Biomedicine , Lucerne University of Applied Sciences and Arts , Institute for Research in Biomedicine , IBM Research Zurich Lab , University of St. Gallen , University of Lucerne , University of Lausanne , University of Geneva , University of Fribourg , University of Berne , University of Basel , Université de Neuchâtel , Swiss Institute of Bioinformatics , Swiss National Science Foundation , Swiss Federal Institute for Forest, Snow and Landscape Research , Institute of Robotics and Intelligent Systems D-MAVT , TU Berlin , TU Darmstadt , TU Dresden , RWTH Aachen University , Technische Universität München , Technische Universität Hamburg , Max Planck Society , University of Oxford , University of Leeds , University of Cambridge , UCL - University College London , National Institute for Medical Research , Imperial College London , Royal College of Art , Empa , Università della Svizzera italiana , Hochschulmedizin Zürich , Hong Kong University of Science and Technology , University of Washington , Tokyo Institute of Technology , The University of Tokyo
Organization Sensory-Motor Systems Lab
Hosts Paez Diego, Dr. , Paez Diego, Dr. , Paez Diego, Dr.
Topics Medical and Health Sciences , Information, Computing and Communication Sciences , Behavioural and Cognitive Sciences
Time-continuous Facial Motion Capture Using Event Cameras

Traditional facial motion capture systems, including marker-based methods and multi-camera rigs, often struggle to capture fine details such as micro-expressions and subtle wrinkles. While learning-based techniques using monocular RGB images have improved tracking fidelity, their temporal resolution remains limited by conventional camera frame rates. Event-based cameras present a compelling solution, offering superior temporal resolution without the cost and complexity of high-speed RGB cameras. This project explores the potential of event-based cameras to enhance facial motion tracking, enabling the precise capture of subtle facial dynamics over time.
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2025-03-19 , Earliest start: 2025-03-23 , Latest end: 2025-12-31
Organization Robotics and Perception
Hosts Pellerito Roberto
Topics Engineering and Technology
Wearable kirigami antenna for motion monitoring
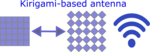
The aim of the project is to develop a simple method for fabrication of kirigami-inspired laser-cut or molded antennas on flexible substrates. This technology will enable advancements in wearable electronics for wireless communication and sensing applications.
Keywords
wearable, flexible electronics, kirigami, laser cutting, 3D printing, antenna design, conductivity, wireless communication
Labels
Semester Project , Bachelor Thesis
Description
Goal
Contact Details
More information
Published since: 2025-03-09 , Earliest start: 2025-03-24 , Latest end: 2026-08-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Kateb Pierre
Topics Engineering and Technology
Development of intelligent lab-on-a-chip devices for high-throughput cell manipulation and microrobot production

Microfluidic devices can be employed in biological research as lab-on-a-chip (LoC) and organ-on-a-chip (OoC) systems. These platforms enable precise in-situ cell manipulation within a highly controlled environment. In the project, we aim to develop an intelligent LoC/OoC device featuring a flexible smart “switch”, for massive production of biohybrid microrobots and high-throughput cell manipulation and drug testing.
Keywords
Lab-on-a-chip, organ-on-a-chip, magnetic microrobot, cell manipulation
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2025-03-05 , Earliest start: 2025-03-10 , Latest end: 2025-12-31
Applications limited to ETH Zurich , Empa , EPFL - Ecole Polytechnique Fédérale de Lausanne , University of Basel , University of Berne , University of Fribourg , University of Geneva , University of Lausanne , University of Lucerne , University of St. Gallen , University of Zurich , Zurich University of Applied Sciences , Zurich University of the Arts , Hochschulmedizin Zürich , Lucerne University of Applied Sciences and Arts
Organization Multiscale Robotics Lab
Hosts Zhu Jiawei
Topics Engineering and Technology , Biology
Beyond Value Functions: Stable Robot Learning with Monte-Carlo GRPO

Robotics is dominated by on-policy reinforcement learning: the paradigm of training a robot controller by iteratively interacting with the environment and maximizing some objective. A crucial idea to make this work is the Advantage Function. On each policy update, algorithms typically sum up the gradient log probabilities of all actions taken in the robot simulation. The advantage function increases or decreases the probabilities of these taken actions by comparing their “goodness” versus a baseline. Current advantage estimation methods use a value function to aggregate robot experience and hence decrease variance. This improves sample efficiency at the cost of introducing some bias. Stably training large language models via reinforcement learning is well-known to be a challenging task. A line of recent work [1, 2] has used Group-Relative Policy Optimization (GRPO) to achieve this feat. In GRPO, a series of answers are generated for each query-answer pair. The advantage is calculated based on a given answer being better than the average answer to the query. In this formulation, no value function is required. Can we adapt GRPO towards robot learning? Value Functions are known to cause issues in training stability [3] and a result in biased advantage estimates [4]. We are in the age of GPU-accelerated RL [5], training policies by simulating thousands of robot instances simultaneously. This makes a new monte-carlo (MC) approach towards RL timely, feasible and appealing. In this project, the student will be tasked to investigate the limitations of value-function based advantage estimation. Using GRPO as a starting point, the student will then develop MC-based algorithms that use the GPU’s parallel simulation capabilities for stable RL training for unbiased variance reduction while maintaining a competitive wall-clock time.
Keywords
Robot Learning, Reinforcement Learning, Monte Carlo RL, GRPO, Advantage Estimation
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2025-03-05
Organization Robotic Systems Lab
Hosts Klemm Victor
Topics Information, Computing and Communication Sciences , Engineering and Technology , Behavioural and Cognitive Sciences
Magnetic microrobots for targeted therapies

Recent advancements in medical robotics have significantly enhanced precision and innovation in healthcare, indicating a new era of minimally invasive procedures that reduce patient complications and discomfort. In particular, the development of robots constructed from materials with elastic moduli similar to soft biological tissues offers substantial promise for biomedical applications, as their inherent mechanical compliance improves safety during procedures. This project aims to fabricate double-compartment, soft, tether-free magnetic microrobots and to investigate their locomotion strategies. Critical parameters, including shape and magnetic anisotropy, will be examined in detail. Finally, the prototypes will be loaded with a model drug and evaluated in vitro using a silicone model.
Keywords
Nanoparticles, Iron Oxide, Hydrogel, Magnetic Navigation, Anisotropy
Labels
Semester Project , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2025-03-04 , Earliest start: 2025-03-09 , Latest end: 2025-08-31
Applications limited to ETH Zurich
Organization Multiscale Robotics Lab
Hosts Pustovalov Vitaly
Topics Engineering and Technology , Earth Sciences , Chemistry
Differentiable Simulation for Precise End-Effector Tracking

Unlock the potential of differentiable simulation on ALMA, a quadrupedal robot equipped with a robotic arm. Differentiable simulation enables precise gradient-based optimization, promising greater tracking accuracy and efficiency compared to standard reinforcement learning approaches. This project dives into advanced simulation and control techniques, paving the way for improvements in robotic trajectory tracking.
Keywords
Differentiable Simulation, Learning, ALMA
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2025-02-07 , Earliest start: 2025-01-27
Organization Robotic Systems Lab
Hosts Mittal Mayank , Schwarke Clemens , Klemm Victor
Topics Information, Computing and Communication Sciences
Master's Thesis: AI-powered nap detection from Fitbit data

The uprise of consumer-grade fitness trackers has opened the doors to long-term activity monitoring in the wild in research and clinics. However, Fitbit does not identify napping episodes shorter than 90 minutes. Hence, there is a need to establish a robust algorithm to detect naps.
Keywords
Data analysis, machine learning, signal processing, wearables, Fitbit, naps detection
Labels
Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2025-02-06 , Earliest start: 2025-02-10 , Latest end: 2025-08-31
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Gnarra Oriella , Gnarra Oriella
Topics Information, Computing and Communication Sciences , Engineering and Technology
Designing Freeform Trajectories through Acoustic Streaming and Artificial Intelligence
The manipulation of materials and fluids through acoustic streaming has emerged as a powerful technique with applications in manufacturing and biomedical engineering. This method utilizes sound waves to control the movement of particles within a fluid, offering precise and non-invasive manipulation. However, achieving freeform path manipulation—guiding materials along complex, non-linear trajectories—remains a significant challenge due to difficulties in controlling the influence range and vortex dynamics of acoustic streaming. Traditional methods often struggle with maintaining precision and stability along intricate paths, as the non-uniform distribution of acoustic forces complicates consistent directionality. Artificial Intelligence (AI) presents a promising solution, enabling real-time control and optimization of these systems. By integrating AI with acoustic streaming, algorithms can analyze and predict the interactions between acoustic forces and fluid dynamics, allowing for dynamic adjustments that enhance accuracy. In this thesis, we propose addressing these challenges by implementing a pillar array of acoustic actuators coupled with AI-driven control systems. The pillar array will generate and modulate acoustic streaming fields, while AI will optimize and automate their control in real time. This integration aims to improve the precision of freeform path manipulation, facilitating the creation of complex patterns that are otherwise difficult to achieve, thereby expanding the possibilities for material manipulation across various applications.
Keywords
Freeform path; Manipulation; Ultrasound; pillar array; AI
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2025-02-05 , Earliest start: 2025-02-06 , Latest end: 2025-09-30
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Deng Yong
Topics Engineering and Technology
Computational Modeling of Muscle Dynamics for Biohybrid Robots
This research aims to advance biohybrid robotics by integrating living biological components with artificial materials. The focus is on developing computational models for artificial muscle cells, a critical element in creating biohybrid robots. Challenges include modeling the complex and nonlinear nature of biological muscles, considering factors like elasticity and muscle fatigue, as well as accounting for fluid-structure interaction in the artificial muscle's environment. The research combines first principle soft body simulation methods and machine learning to improve understanding and control of biohybrid systems.
Keywords
Biohybrid Robotics, Computational Models, Soft Body Simulation, Finite Element Method (FEM), Muscle Dynamics, Soft Robotics
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2025-02-04 , Earliest start: 2025-02-01 , Latest end: 2026-02-01
Organization Soft Robotics Lab
Hosts Mekkattu Manuel , Katzschmann Robert, Prof. Dr.
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Biology , Physics
GPU Acceleration of Soft Robot Modeling: Enhancing Performance with CUDA

We are enhancing soft robot modeling by developing a GPU-accelerated version of our FEM-based framework using CUDA. This research focuses on optimizing parallel computations to significantly speed up simulations, enabling larger problem sizes and real-time control. By improving computational efficiency, we aim to advance soft robotics research and facilitate more detailed, dynamic simulations.
Keywords
Soft Body Simulation, high-performance computing, GPU programming, Parallel Computing, Finite Element Method (FEM), Multiphysics Simulation
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2025-02-04 , Earliest start: 2025-02-01 , Latest end: 2026-02-01
Organization Soft Robotics Lab
Hosts Katzschmann Robert, Prof. Dr. , Mekkattu Manuel
Topics Information, Computing and Communication Sciences , Engineering and Technology
Advancing Soft Robot Modeling: Integrating Physics, Optimization, and Control

We are advancing soft robot simulation with FEM and energy-based methods to model complex, adaptive behaviors. This research entails developing the framework to support diverse designs, integrate new physics models, and optimize performance, enabling enhanced control and real-world applications of soft robots.
Keywords
Soft Robotics, Finite Element Method (FEM), Physical Modeling, Benchmarking, Optimization, Multiphysics Simulation, Sim-to-Real
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2025-02-04 , Earliest start: 2025-02-01 , Latest end: 2026-02-01
Organization Soft Robotics Lab
Hosts Mekkattu Manuel , Katzschmann Robert, Prof. Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
A Bayesian sensor fusion and machine learning approach for robust hand gesture decoding with application to stroke rehabilitation.

About the project: This thesis aims to design a framework for robust fine-motor action decoding using multi-modal (sEMG and depth sensing camera) Bayesian sensor fusion and machine learning approach
Keywords
Bayesian inference, sEMG, depth sensing camera, rehabilitation, machine learning, deep transfer learning
Labels
Semester Project , Bachelor Thesis , Master Thesis
Project Background
Your Task
Your Benefits
Your Profile
Contact Details
More information
Published since: 2025-02-01 , Earliest start: 2025-03-01 , Latest end: 2025-08-01
Organization Sensory-Motor Systems Lab
Hosts Dash Adyasha
Topics Medical and Health Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Master Thesis: Data Analysis of Wearable and Nearable Sensors Data for Classification of Activities of Daily Living

This project aims to develop a novel algorithm for tracking a person's health condition changes using daily life wearable sensor data, biosignals, and information from nearable sensors. With the Life-long-logging system, we want to provide meaningful data for medical staff and directly engage patients and their caregivers.
Keywords
Data analysis, Machine Learning, Wearable Sensors
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2025-01-22 , Earliest start: 2025-02-03 , Latest end: 2025-09-30
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Gnarra Oriella , Gnarra Oriella
Topics Information, Computing and Communication Sciences , Engineering and Technology
Master Thesis: Data Analysis of Wearable and Nearable Sensors Data within the StrongAge Cohort Study
The StrongAge Dataset, collected over one year, provides a rich data repository from unobtrusive, contactless technologies combined with validated mood and cognition questionnaires. This project aims to uncover digital biomarkers that can transform elderly care, addressing critical research questions related to sleep, cognition, physical activity, and environmental influences.
Keywords
Data analysis, Machine learning, Wearable and Nearable Sensors Data
Labels
Semester Project , Internship , Lab Practice , Bachelor Thesis , Master Thesis , Student Assistant / HiWi , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2025-01-22 , Earliest start: 2025-02-03 , Latest end: 2025-09-30
Organization Spinal Cord Injury & Artificial Intelligence Lab
Hosts Gnarra Oriella , Gnarra Oriella
Topics Information, Computing and Communication Sciences , Engineering and Technology
Nanometric Thin Films for Brain Stimulation Implants

This project aims to fabricate and characterize thin films of ceramic oxides (with thickness in the nanometer range) which have potential applications in biomedical devices, such as implanted flexible electronics (Fig. a) and functional microrobots (Fig. b).
Keywords
Materials science, Thin films, Brain Implants, Microrobots
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2025-01-08 , Earliest start: 2025-01-19 , Latest end: 2026-12-31
Organization Multiscale Robotics Lab
Hosts Mirjolet Mathieu
Topics Engineering and Technology , Physics
Deep Reinforcement Learning to Control Microrobots in 3D Dynamic Flow Environments

Identifying effective control strategies for the automation of acoustic robotic systems is challenging in a microfluidic environment. This project focuses on reinforcement learning (RL) to control microrobots in chaotic microfluidic flow and vortices.
Keywords
Reinforcement learning, Artificial Intelligence, Ultrasound, Fluid control
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2024-08-05 , Earliest start: 2024-08-05 , Latest end: 2025-06-30
Organization Acoustic Robotics for Life Sciences and Healthcare (ARSL)
Hosts Medany Mahmoud
Topics Information, Computing and Communication Sciences , Engineering and Technology